dynadojo.systems.ca.CASystem#
- class dynadojo.systems.ca.CASystem#
Bases:
AbstractSystemCellular automaton (CA). Implements a one-dimensional CA.
Example
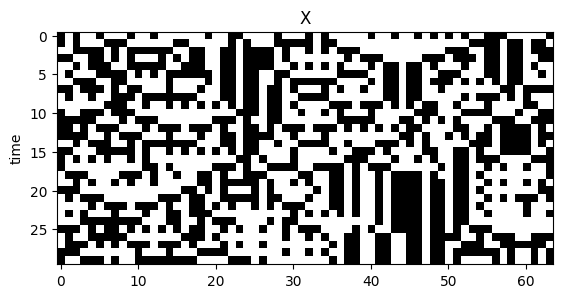
>>> from dynadojo.utils.ca import plot >>> from dynadojo.wrappers import SystemChecker >>> latent_dim = 3 >>> embed_dim = 64 >>> timesteps = 30 >>> n = 10 >>> system = SystemChecker((latent_dim, embed_dim, seed=1)) >>> x0 = system.make_init_conds(n=n) >>> x = system.make_data(x0, timesteps=timesteps) >>> plot([x], labels=["X"])
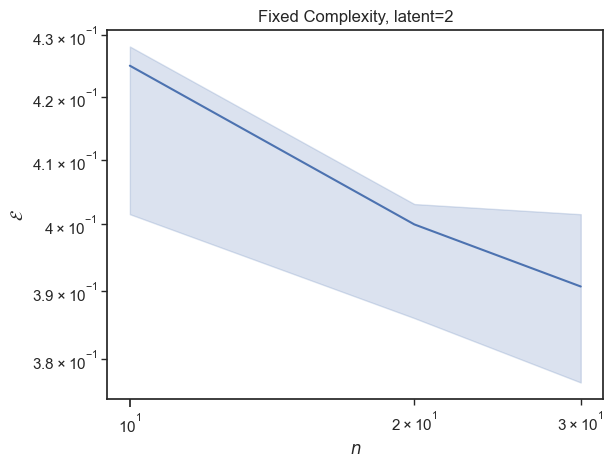
>>> from dynadojo.challenges import FixedComplexity >>> from dynadojo.baselines.cnn import CNN >>> challenge = FixedComplexity(l=2, e=64, t=10, N=[10, 20, 30], reps=3, system_cls=CASystem, test_examples=1, test_timesteps=5) >>> data = challenge.evaluate(algo_cls=CNN) >>> challenge.plot(data)
Methods
__init__([latent_dim, embed_dim, in_dist_p, ...])Initializes a CASystem instance.
calc_control_cost(control)Calculate the control cost for each control trajectory (i.e., calculates the costs for every control matrix, not for the whole tensor).
calc_error(x, y)Calculates the error between two tensors of trajectories.
make_data(init_conds, control, timesteps[, ...])Makes trajectories from initial conditions.
make_init_conds(n[, in_dist])Generate initial conditions..
Attributes
The embedded dimension for the system.
The latent dimension for the system.
The random seed for the system.
- __init__(latent_dim=2, embed_dim=64, in_dist_p=0.25, out_dist_p=0.75, mutation_p=0.0, seed=None)#
Initializes a CASystem instance.
- Parameters:
latent_dim (int) – The radius of the CA.
embed_dim (int) – The number of cells in each row of the grid.
in_dist_p (float) – The parameter of the binomial that generate the initial condition for in distribution initial conditions.
out_dist_p (float) – The parameter of the binomial that generate the initial condition for out-of-distribution initial conditions.
mutation_p (float) – If noisy, mutation_p is the chance that any cell of completed generation is flipped. For example, with mutation_p = 1, an unmutated generation 0010 would become 1101.
- calc_control_cost(control)#
Calculate the control cost for each control trajectory (i.e., calculates the costs for every control matrix, not for the whole tensor).
- Parameters:
control (numpy.ndarray) – (n, timesteps, embed_dim) Controls tensor.
- Returns:
(n,) Control costs vector.
- Return type:
numpy.ndarray
- calc_error(x, y)#
Calculates the error between two tensors of trajectories.
- Parameters:
x (numpy.ndarray) – (n, timesteps, embed_dim) Trajectories tensor.
y (numpy.ndarray) – (n, timesteps, embed_dim) Trajectories tensor.
- Returns:
The error between x and y.
- Return type:
float
- property embed_dim#
The embedded dimension for the system.
- property latent_dim#
The latent dimension for the system.
- make_data(init_conds, control, timesteps, noisy=False)#
Makes trajectories from initial conditions.
- Parameters:
init_conds (numpy.ndarray) – (n, embed_dim) Initial conditions matrix.
control (numpy.ndarray) – (n, timesteps, embed_dim) Controls tensor.
timesteps (int) – Timesteps per training trajectory (per action horizon).
noisy (bool, optional) – If True, add noise to trajectories. Defaults to False. If False, no noise is added.
- Returns:
(n, timesteps, embed_dim) Trajectories tensor.
- Return type:
numpy.ndarray
- make_init_conds(n, in_dist=True)#
Generate initial conditions..
Note
Systems developers determine what counts as in vs out-of-distribution. DynaDojo doesn’t provide any verification that this distinction makes sense or even exists. See
LDSystemfor a principled example.- Parameters:
n (int) – Number of initial conditions.
in_dist (bool, optional) – If True, generate in-distribution initial conditions. Defaults to True. If False, generate out-of-distribution initial conditions.
- Returns:
(n, embed_dim) Initial conditions matrix.
- Return type:
numpy.ndarray
- property seed#
The random seed for the system.